




نقد و بررسی : نرم افزار نقشه برداری OnPoz Cloud EZSURV
نرم افزار نقشه برداری OnPoz Cloud EZSURV جهت پس پردازش داده های GNSS/GPS که دقت RTK در حالت آفلاین PPK محاسبه می نماید و ساخت OnPOZ Cloud کانادا می باشد. راهکاری قابل اطمینان و کارآمد را برای بهبود دقت و صحت داده های برداشتی و یا GIS فراهم می نماید. توسط EZSurve می توانید همچنین تا 10000 ایستگاه را مشاهده نمایید.
پس پردازش چیست؟
چندین روش مختلف برای بهبود دقت موقعیت های جمع آوری شده با گیرنده GNSS به منظور دستیابی به دقت بالاتر وجود دارد. هر روش دارای مزایای متفاوتی است و برای وظایف و پروژه های مختلف مناسب تر است.
شناخته شده ترین آنها Real Rime Kinematic (RTK) است. داده های جمع آوری شده توسط یک گیرنده سیار (مریخ نورد) توسط گیرنده ثابت دوم (پایه) تصحیح می شود. گیرنده ثابت معمولاً بخشی از شبکه است که به اشتراک پولی نیاز دارد. اتصال بین دو گیرنده نیاز به یک لینک رادیویی یا اتصال به اینترنت تلفن همراه دارد. مزیت بزرگ این روش این است که موقعیت دقیق مریخ نورد تقریباً بلافاصله محاسبه می شود.
تعیین موقعیت دقیق نقطه (PPP) به هزینه خدمات یا اشتراک نیاز ندارد. می توان از آن در مناطق دور افتاده و بدون اتصال به اینترنت استفاده کرد. متأسفانه این روش بسیار کند است. برای دستیابی به دقت سانتی متری، گیرنده باید ساعت ها در همان موقعیت باقی بماند. پردازش مختصات جمعآوری شده چندین هفته به تأخیر میافتد – زمان لازم برای تعیین مدار دقیق ماهوارهها در زمان جمعآوری دادهها.
بهترین هر دو جهان توسط به اصطلاح پس پردازش (PP) مورد استفاده در سیستم هایی مانند OnPOZ Cloud نشان داده می شود. هیچ هزینه خدماتی وجود ندارد و یک گیرنده برای به دست آوردن بهترین دقت ممکن کافی است. گرفتن موقعیت در زمین می تواند کمتر از 1 ثانیه طول بکشد. سپس داده ها با موقعیت یک ایستگاه پایه عمومی مجاور تطبیق داده می شوند. در بیشتر موارد، موقعیت نهایی را می توان در عرض یک ساعت محاسبه کرد. دقت به دست آمده معمولاً بهتر از روش RTK است.
نرم افزار نقشه برداری OnPoz Cloud EZSURV با در نظر گرفتن همه چیز، RTK گران ترین راه است. هنگامی که مختصات دقیق فوراً مورد نیاز است، هزینه با سرعت توجیه می شود. PPP فقط در زمان بررسی دور از تمدن عملی است و هیچ گزینه دیگری وجود ندارد. پس پردازش امکان جمع آوری موقعیت های GNSS را سریع و دقیق بدون هزینه های خدمات RTK گران می دهد. این امر پس پردازش را مقرون به صرفه ترین و کارآمدترین راه برای جمع آوری موقعیت های با دقت بالا می کند.
What is EZSURV?
EZSurv® is GNSS Post-Processing software that provides a reliable and efficient RTK offline solution to improve the accuracy of your survey or GIS data. With EZSurv, you can also view 10,000 base stations, accessible automatically.
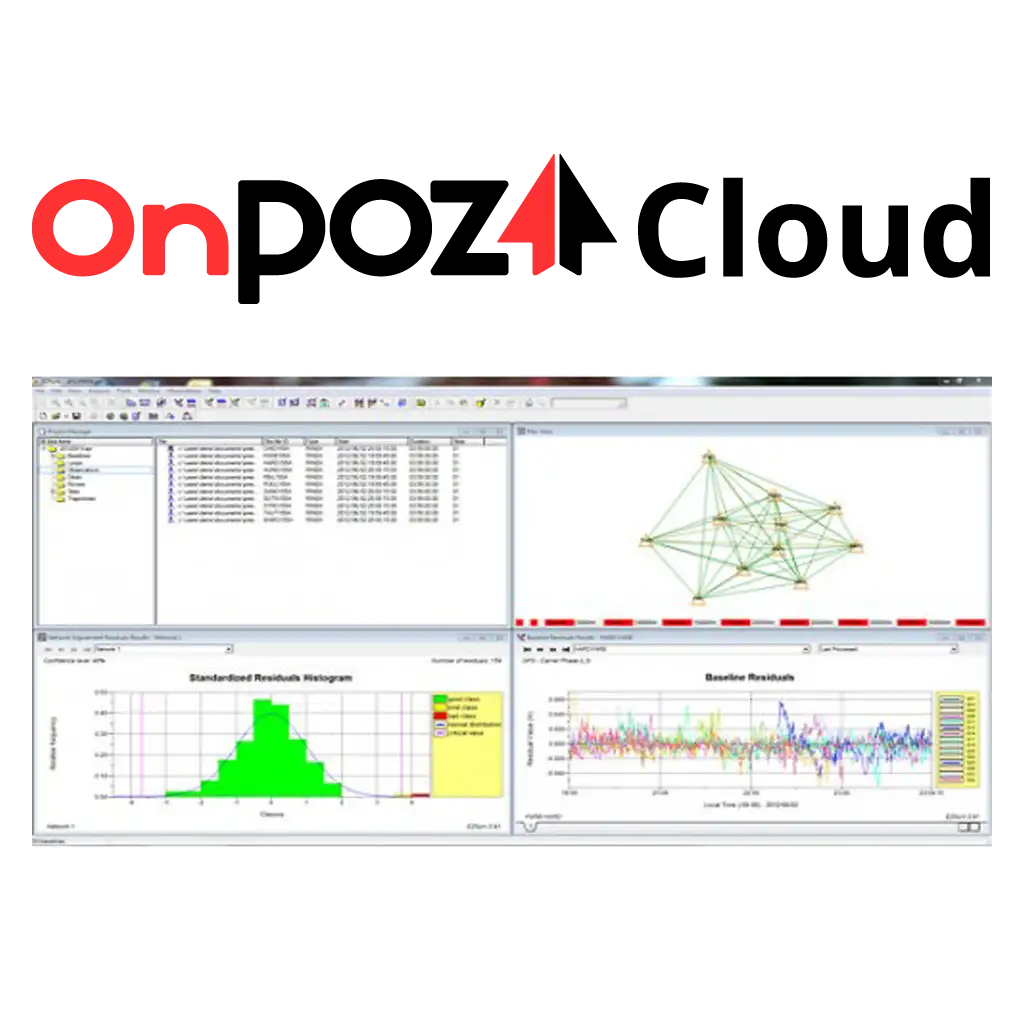
Post-Processing
Post-processing at your fingertip
Use EZSurv GNSS Post-Processing software:
to play back your RTK survey for QA control (Post-Processed Kinematic – PPK).
to significantly improve GIS data accuracy
to calculate high accuracy baseline results (Static and Rapid Static)
to make corrections to non-RTK GNSS field data (Post-Processed Kinematic – PPK)
Reliable & Flexible
OnPOZ Cloud EZSURV Post Processing Software is a reliable and effortless solution that allows seamless data post-processing between different GNSS receiver native formats. This real value-added step can be easily integrated into your current RTK process or your GIS data integration loop. EZ-Surv is an open solution that processes GPS, GLONASS, Galileo and BeiDou signals from different types of receiver brands. It is compatible with industry standard data collection software.
As in RTK mode, EZSurv can either use your own base station data or automatically connect to different base station providers. This flexibility allows you to retrieve the closest base station data required to compute accurate rovers’ positions in post-mission. EZSurv can also generate OminiStar/WADGPS/StarFire equivalent point positioning accuracy (Precise Point Positioning) by using post-mission precise orbit and clock data calculated by different international agencies.
Versions
No limitation in terms of data import: imports the data of an unlimited number of receivers (native format & Rinex)
No limitation regarding EZ-Surv features (PP-static, PPK, PPP-static, PPP-kinematic, etc)
You need your activation code installed on the PC that runs EZ-Surv (but the activation can be easily moved to another PC)
Compatible with the following data collection software.
Native formats supported.
EZSurv RINEX
Limited to RINEX files
No limitation regarding EZSurv features (PP-static, PPK, PPP-static, PPP-kinematic, etc)
You need your activation code installed on the PC that runs EZ-Surv (but the activation can be easily moved to another PC)
OnPOZ Cloud EZSURV Post Processing Software Compatible with FieldGenius data collection software.
What is post-processing?
There are several different methods to improve the accuracy of the positions collected with a GNSS receiver in order to achieve higher accuracy. Each method has different advantages and is better suited for different tasks and projects.
The most widely known is the Real Rime Kinematic (RTK). The data collected by one mobile receiver (rover) is corrected by a second stationary receiver (base). The stationary receiver is usually part of a network that requires a paid subscription. The connection between the two receivers requires a radio link or mobile internet connection. The great advantage of this method is that the accurate position of the rover is calculated almost immediately.
Precise Point Positioning (PPP) does not require service fees or subscriptions. It can be used in remote areas with no internet connection. Unfortunately, this method is extremely slow. In order to achieve centimeter accuracy, the receiver has to stay on the same position for many hours. The processing of the collected coordinates is delayed several weeks – the time necessary to establish the precise orbits of the satellites at the time when the data was collected.
The best of both worlds is represented by the so-called post-processing (PP) used in systems like OnPOZ Cloud. There are no service fees and one receiver is enough to obtain the best possible accuracy. Taking the position on the field can take as little as 1 second. The data is then matched to the position of a nearby public base station. In most cases, the final position can be calculated within an hour. The achieved accuracy is typically better than the RTK method.
All things considered, RTK is the most expensive way. The cost is justified by the speed when the accurate coordinates are needed right away. PPP is practical only when surveying far from the civilisation and there is no other option. Post-processing allows to collect GNSS positions quickly and precisely without costly RTK service fees. That makes post-processing the most affordable and efficient way of collecting high-accuracy positions.
مشخصات فنی : OnPoz Cloud EZSURV
| برند | |
|---|---|
| کشور سازنده | کانادا |
برای نوشتن دیدگاه باید وارد بشوید.









دیدگاهی ثبت نشده.